Principales modalidades de arranque de un motor asíncrono trifásico con rotor de jaula de ardilla

En ABB nos gusta compartir conocimiento con los profesionales del sector. Creemos que e sumamente enriquecedor para ambas partes y que nos ayuda eficazmente a trabajar mejor y a avanzar en la búsqueda de nuevas soluciones.
Por eso, desde hace años mantenemos un compromiso de interlocución con los profesionales, programando cursos y conferencias, colaborando con diversas escuelas y universidades, enviando documentación sobre normativas y otros temas de interés.
En esta línea, nos complace anunciarle, que hemos iniciado una serie de tres artículos técnicos correlativos en referencia al motor asíncrono trifásico. La estructura de los artículos será la siguiente:
- Tipos y usos.
- Protección y maniobra del motor asíncrono.
- Principales modalidades de arranque de un motor asíncrono trifásico con rotor de jaula de ardilla.
3. Principales modalidades de arranque de un motor asíncrono trifásico con rotor de jaula de ardilla
Independientemente de las clasificaciones antes mencionadas, el arranque de un motor asíncrono trifásico, para las aplicaciones en las que no se necesite una variación de la velocidad de las máquinas, puede realizarse mediante diversas soluciones de instalación que se diferencian por el modo en que se les aplica la tensión a los devanados del estátor y por el valor de los parámetros eléctricos y mecánicos que producen, por ejemplo, esfuerzos más o menos violentos sobre la máquina eléctrica, pero que ponen a disposición parámetros de par inicial de arranque de valores muy diversos. Comenzaremos entrando más en detalle en lo que respecta a los tipos de arranque más comunes.
3.1 Arranque directo
El sistema de arranque directo es quizás el más tradicional y consiste en conectar el motor directamente a la red de alimentación eléctrica ejecutando, por lo tanto, un arranque a plena tensión; a menudo se abrevia con la sigla DOL (Direct On Line, “directo en línea”).
El arranque directo representa el sistema más simple y económico para arrancar el motor asíncrono de jaula y es tradicionalmente el más utilizado. Prevé, como se muestra en la figura 5, la conexión directa a la red de alimentación y, por lo tanto, el arranque tiene lugar a plena tensión y con frecuencia constante, desarrollando un par de arranque elevado con tiempos de aceleración de media muy reducidos. Las aplicaciones típicas son relativas a motores de poca potencia incluso con arranque a plena carga.
Estas ventajas llevan intrínsecas algunos problemas, como por ejemplo la elevada corriente inicial de arranque, que puede alcanzar en los primeros instantes valores de hasta 10 ó 12 veces la intensidad nominal, para decrecer después a valores cercanos a las 6 u 8 veces y permanecer en este rango hasta alcanzar la velocidad de par máxima.
Los efectos de dicha corriente pueden identificarse en los elevados esfuerzos electrodinámicos de los cables de conexión al motor y podrían afectar incluso a los devanados del propio motor; además, los elevados pares iniciales de arranque pueden dar lugar a violentas aceleraciones que repercuten en esfuerzos sobre los elementos de transmisión (correas y juntas mecánicas) generando problemas en la distribución con la consecuente reducción de la vida mecánica de los componentes. Finalmente, han de tenerse en cuenta eventuales problemas de naturaleza eléctrica por caídas de la tensión en la línea de alimentación del motor o de la aparamenta conectada a la misma.
3. 2 Arranque con tensión reducida
Los sistemas de arranque con tensión reducida consisten en conectar el motor a la red de alimentación eléctrica indirectamente.
Esto no sólo comporta una reducción de la corriente de arranque, sino también la reducción del par inicial de arranque. Los tipos más comunes de arranque son el arranque con reactores o resistencias estatóricas, el arranque en estrella-triángulo, el arranque con autotransformador y el arranque con arrancador suave, que interviene en la curva de par del motor con el fin de adaptarla a las características de la carga. Figura 5: Esquema del principio de arranque directo 2 | ABB El motor asíncrono trifásico - Artículo técnico (3/3)
3. 2.1 Arranque en estrella-triángulo Y/Δ
Los sistemas de arranque con tensión reducida consisten en conectar el motor a la red de alimentación eléctrica indirectamente.
Esto no sólo comporta una reducción de la corriente de arranque, sino también la reducción del par inicial de arranque. Los tipos más comunes de arranque son el arranque con reactores o resistencias estatóricas, el arranque en estrella-triángulo, el arranque con autotransformador y el arranque con arrancador suave, que interviene en la curva de par del motor con el fin de adaptarla a las características de la carga.
El arranque en estrella-triángulo es el más conocido y quizás el más utilizado entre los métodos de arranque con tensión reducida y sirve para arrancar el motor reduciendo los esfuerzos mecánicos y limitando las corrientes durante el arranque; por contra, pone a disposición, como ya se ha mencionado, un par inicial de arranque reducido.
Puede utilizarse para motores dotados de una placa con 6 bornes y con doble tensión de alimentación. Resulta especialmente idóneo para arranque en vacío o con cargas de par bajo y constante o ligeramente creciente, como es el caso de ventiladores o bombas centrífugas de poca potencia.
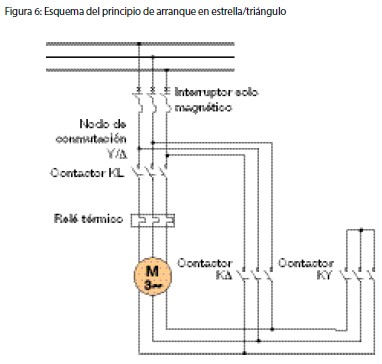
En referencia al esquema eléctrico de la figura 6, la modalidad de arranque prevé la fase inicial de arranque con conexión de los devanados en estrella que se realiza con el cierre del interruptor, del contactor de línea KL y de estrella KY. Tras un periodo de tiempo idóneo y debidamente calibrado se pasa a la conexión de los devanados en Δ a través de la apertura del contactor KY y el cierre de KΔ, que es también la configuración de la marcha de régimen. Estos aparatos se ven afectados por corrientes, relativas a las diversas fases de arranque, que son inferiores a la intensidad nominal del motor, como se ilustrará a continuación.
Incluso la protección térmica, que normalmente se coloca aguas abajo del nodo de conmutación Y/Δ, deberá fijarse para una corriente inferior respecto de la intensidad nominal del motor. Además, la protección térmica instalada en esta posición es sensible a las corrientes de tercer armónico que se generan por la saturación del hierro y que permanecen encerradas en el circuito de triángulo.
Pasemos a analizar con más detalle las diversas fases del arranque:
Fase de estrella (Y)
Es la fase de arranque en la que los devanados del motor están conectados en estrella y por tanto con tensión

La corriente resultante en los devanados del motor y en la línea es
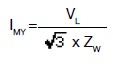
Con ZW se indica la impedancia del devanado.
Tal y como se ha explicado, esta fase del arranque coincide con la fase de aceleración y su duración debe ser tal que se alcance casi la velocidad de régimen.
Una duración demasiado breve no conseguiría obtener la reducción de los esfuerzos que caracteriza a este tipo de arranque y que, por lo tanto, se presentarían en la sucesiva fase de triángulo, reproduciendo condiciones de arranque similares a las del arranque directo.
Fase de conmutación
Es la fase en la que, con las maniobras de apertura y cierre de los contactores específicos, se pasa de la fase de estrella a la de triángulo. Son importantes la duración y la regulación de la conmutación; de hecho, el tiempo de transición debe permitir la extinción del arco eléctrico sobre el contactor de estrella e impedir un cierre prematuro del contactor de triángulo que cause una condición de cortocircuito.
Sin embargo, un tiempo excesivamente elevado de paso de Y a Δ provocaría la deceleración del motor, con los consiguientes picos de corriente que se formarían en la fase de triángulo.
La conmutación se regula con temporizadores analógicos o digitales y, a título orientativo, el tiempo de conmutación puede fijarse en aproximadamente 50 ms. En el temporizador se fija también el tiempo de duración de la fase de estrella, es decir, el tiempo de aceleración o de arranque que, con carácter general, puede considerarse una función de la diferencia entre el par medio del motor y el par de resistencia medio del conjunto motor-máquina.
Una buena conmutación, necesaria para que las ventajas que teóricamente caracterizan al arranque Y/Δ sean efectivas, debe realizarse teniendo también en cuenta el sentido de rotación y la secuencia de las conexiones de los devanados, que se realizan en los bornes del motor, en el paso de Y a Δ. Si la conmutación tuviera lugar en un momento en el que el magnetismo residual del rotor se encontrase en oposición de fase con el campo magnético generado por la corriente del estátor, la demanda de corriente podría ser a su vez muy elevada, con valores que podrían alcanzar hasta 20 veces la intensidad nominal. Las consecuencias derivadas de una conmutación incorrectamente calibrada afectan, además del motor, al comportamiento de los aparatos destinados a la coordinación, provocando un funcionamiento no idóneo e imprevisible.
Fase de triángulo (Δ)
La conmutación que ha tenido lugar continúa en la fase final del proceso de arranque, que representa también la condición de marcha de régimen en la que los devanados de estátor se conectan en triángulo y son sometidos a la tensión total de red VL y el motor recobra el par completo, mientras que la corriente que atraviesa los devanados es

y la corriente que absorbe de la línea (intensidad nominal “le” del motor) es
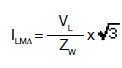
Analizando las expresiones de las corrientes y las tensiones antes proporcionadas, se aprecia cómo la fase de arranque en Y tiene lugar a un valor de tensión igual a 0,577 veces la tensión de red VL y que requiere la absorción (de la línea o en los devanados en Y) de 0,33 veces la corriente que el motor absorbería de la línea si se arrancara con arranque directo y con el motor conectado en triángulo. De la precedente relación relativa a la corriente en la fase de Y a la corriente de línea en la fase de Δ se deduce justamente que

De las leyes de la electrónica se deduce cómo la reducción de las corrientes absorbidas reducen los esfuerzos electrodinámicos en la misma proporción, mientras que la reducción de la tensión reduce el par inicial de arranque de forma cuadrática (por lo tanto, 3 veces). Las razones y las características alegadas anteriormente con motivo de la utilización del sistema de arranque en Y/Δ (es decir, la reducción de la elevada caída de tensión provocada por la corriente inicial de arranque y la reducción del excesivo par inicial de arranque que causaría daños a los acoplamientos de la máquina en servicio), en algunos tratados o comentarios técnicos no se consideran aspectos significativos y reales hasta el punto de ratificar como válido el método de arranque en Y/Δ.
En cualquier caso no puede negarse el hecho de que este método se utiliza muy frecuentemente en las aplicaciones industriales clásicas que prevén la utilización de motores asíncronos.
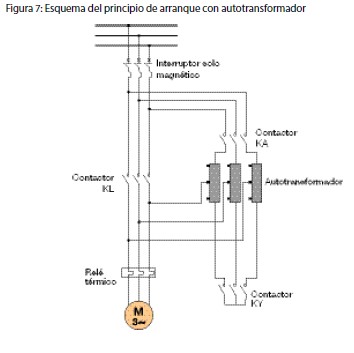
3.2.2 Arranque con autotransformador
La reducción de la tensión de alimentación se realiza mediante un autotransformador con toma fija o con uno más costoso de varias tomas, o incluso con tensión variable con continuidad.
Durante el arranque con autotransformador, como se aprecia en el esquema de la figura 7, el motor está conectado a una de las tomas del autotransformador (interruptor magnético cerrado, KA cerrado, KY cerrado) que reduce la tensión de red “k veces” y que requiere en el motor una corriente reducida de factor similar al que el motor absorbería si fuese alimentado directamente con toda la tensión. La corriente en el primario del autotransformador, y también en la línea, se reduce “k2 veces”. Como consecuencia de la reducción de la tensión en el factor “k” veces, también el par inicial de arranque se reducirá “k2” veces respecto del arranque a plena tensión.
Cuando el motor ha alcanzado indicativamente el 80% - 90% de su velocidad de régimen, el contactor KY se abre y el motor continúa siendo alimentado con tensión reducida por la inductancia de los devanados del autotransformador. En este momento se cierra el contactor KL y se abre el contactor KA de forma que el motor se alimenta directamente de la red. El arranque con autotransformador se considera bastante costoso, seguramente más que el arranque Y/Δ, y tiene aplicaciones en motores de jaula de ardilla de potencia media o alta con inercia elevada.
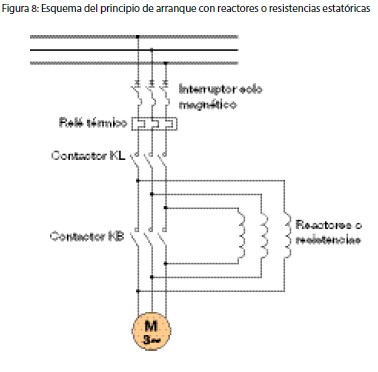
3.2.3 Arranque con reactores o resistencias estatóricas
Este tipo de arranque, cuyo esquema de conexión está representado en la figura 8, es idóneo para rotores de jaula de ardilla, y la caída de la tensión se produce por reactores o resistencias colocados en serie con el estátor en la fase de arranque (KL cerrado, KB abierto); consecuentemente, la tensión que alimenta al motor en la fase inicial disminuye “k” veces respecto a la tensión de red, a la que corresponde una disminución del par de “k2” veces. La corriente inicial de arranque queda limitada a la mitad de la que se obtendría con el arranque a plena tensión. Una vez completada la fase de aceleración, los reactores o las resistencias son excluidos (cierre de KB) y el motor vuelve a poseer los parámetros relativos a la tensión plena.
Pueden realizarse incluso más exclusiones graduales de los reactores o de las resistencias mediante comandos temporizados. Este método acarrea algunas consecuencias, presentes en la fase de arranque, como el notable descenso del factor de potencia a causa de las reactancias o un elevado recalentamiento producido por la disipación de potencia en las resistencias.
Es un sistema adoptado típicamente por máquinas con gran inercia que no necesitan de valores de par y corriente particularmente altos durante el arranque.
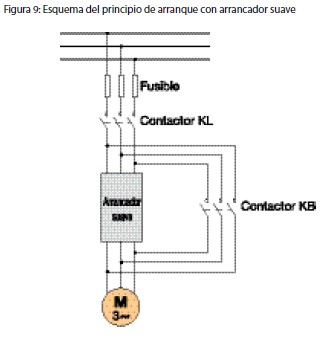
3.2.4 Arranque con arrancador suave
Un método moderno para realizar el arranque, que puede que todavía requiera de una inversión económica inicial considerable, consiste en utilizar arrancadores estáticos electrónicos comúnmente llamados soft starters o arrancadores suaves. La utilización de estos dispositivos, con un esquema de conexión como el de la figura 9, permite reducir la corriente de arranque, determinar el par y fijar el tiempo de arranque; esto hace posible una alimentación muy gradual del motor que incrementa durante todo el procedimiento, a fin de obtener un arranque lineal, evitando esfuerzos eléctricos o en las partes mecánicas que caracterizan en mayor o menor grado los arranques directos y en Y/Δ.
El arrancador suave está constituido principalmente por dos partes: una unidad de potencia y una unidad de mando y control. Los principales componentes de la unidad de potencia son el disipador térmico y los tiristores, controlados por la lógica implementada sobre una tarjeta de control, que constituye la unidad de mando, generalmente con microprocesador. El esquema de conexión típico utilizado es el que se presenta a continuación y que se define como “en línea”. A menudo los fusibles pueden sustituirse por un interruptor, pero éste no permite realizar la protección de los tiristores de forma apropiada en caso de cortocircuito; además, cuando el tipo de arrancador suave no incorpora una protección térmica en su interior, es necesario el uso de un relé térmico externo instalado aguas arriba del nodo de bypass.
En referencia al esquema de conexión en Y/Δ, el arrancador suave también podría insertarse en el interior del nodo de conmutación con una conexión definida “en triángulo”. Por lo general, la fase de arranque tiene lugar con KL cerrado y KB abierto de forma que el arrancador suave pueda controlar el arranque; acto seguido tiene lugar el cierre de KB con la exclusión de la parte de potencia interna del arrancador suave, dejando activa la parte de control.
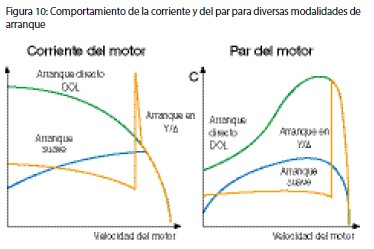
En cuanto a las modalidades de arranque directo, en estrella/triángulo y con arrancador suave, a continuación ilustramos, en la figura 10, un comportamiento típico de la corriente de arranque y del par requeridos por el motor.
Se aprecia claramente cómo el arranque directo constituye la modalidad más costosa en términos de corriente pero con mayor rendimiento en cuanto al par, y cómo con el arranque en Y/Δ se corre el riesgo de reducir la corriente de arranque, incluso si, como ya hemos subrayado, en el momento de la conmutación se presenta un valor de pico muy elevado, todo ello con un valor de par inicial discreto. Probablemente el arranque más equilibrado sea el arranque con arrancador suave.
3.3 Accionamientos de velocidad variable
(fuente: La Guía del Motor ES 03-2006. Motores ABB de baja tensión)
Los motores de inducción de jaula de ardilla ofrecen una disponibilidad, fiabilidad y rendimiento excelentes. Tienen, no obstante, dos puntos débiles: el rendimiento del arranque y el control suave de velocidad a lo largo de una amplia gama. Un motor con un convertidor de frecuencia (accionamiento de velocidad variable, VSD) soluciona ambos problemas. Un motor con accionamiento de velocidad variable puede arrancar suavemente con una intensidad de arranque baja, y la velocidad se puede controlar y ajustar para adaptarse a las necesidades de la aplicación, sin pasos intermedios, en una amplia gama.
Las ventajas de los accionamientos de velocidad variable se reconocen ampliamente y cada día aumenta el número de aplicaciones equipadas con VSD. Según el tamaño de los motores, los accionamientos VSD pueden hallarse presentes en más del 50% de las nuevas instalaciones.
Las ventajas principales de VSD son:
• Velocidad óptima y exactitud del control para ofrecer mayor ahorro de energía y otras ventajas medioambientales.
• Menor mantenimiento.
• Alta calidad de la producción y mayor productividad.
3.3.1 Convertidores
Los convertidores son elementos electrónicos de potencia que convierten la potencia AC de entrada con una tensión y frecuencia fijas, en potencia eléctrica de salida con una tensión y frecuencia variables. Dependiendo de la solución empleada, se utilizan convertidores directos o indirectos.
Convertidores directos
Los convertidores directos son como los convertidores de ciclo y los convertidores de matriz, transforman la potencia de entrada directamente en potencia de salida, sin enlaces intermedios. Los convertidores de ciclo se utilizan en aplicaciones de alta potencia (gama MW) y a frecuencias bajas.
Convertidores indirectos
Los convertidores indirectos son, bien de corriente o bien convertidores de fuente de tensión.
3.3.2 Dimensionar el accionamiento
Selección del convertidor
El converidor debe seleccionarse de acuerdo con la potencia nominal PN del motor. Debe reservarse un margen suficiente de intensidad para controlar las situaciones dinámicas.
3.3.3 Disponibilidad de par
Tanto los cálculos teóricos como las pruebas de laboratorio muestran que la carga (par) máxima continua de un motor accionado por convertidor, depende principalmente de la modulación y de la frecuencia de conmutación del convertidor.
El par de rendimiento de los motores accionados por convertidor de frecuencia se ve habitualmente reducido debido al calentamiento extra producido por los armónicos y por una disminución de la refrigeración según la gama de frecuencia. Es posible, no obstante, mejorar la cargabilidad del motor mediante:
• Refrigeración más efectiva
• Filtros
• Diseño especial del rotor.
3.3.4 Nivel de aislamiento
En un convertidor de frecuencia, la tensión de salida (o intensidad) suele ser un pulso de tensión (intensidad) o un patrón de pulsos. Dependiendo del tipo de los componentes de potencia y del diseñio del circuito de potencia, se desarrollará una sobretensión considerable en el límite del pulso de tensión. consecuentemente, el nivel de aislamiento del bobinado deberá siempre comprobarse siguiendo las instrucciones específicas del producto.